push time:2023-06-26 Popularity: source:1
The requirement for the static characteristics of German HBM sensors is that when the input is 0, the output is also 0. For a certain size of input, the output size is also determined based on a certain corresponding relationship. The static characteristics represent the input-output relationship of the German HBM sensor when the measured values are in a stable state, and its main indicators are sensitivity, linearity, stability, hysteresis, etc.
1. Measurement range and sensitivity
For a certain size of input, the relationship between input and output can be expressed as

If the input changes& Delta; x. Then the corresponding output has& Delta; The change in y, i.e

In the equation, k (x) is the sensitivity coefficient, representing the degree to which the output changes with input.
No matter how large the input value is, the most ideal is to hope that equation (2-2) can hold. But in reality, to make equation (2-2) hold, there are limitations on the range of inputs. Because the working range of sensor components and their conversion circuits is limited. For example, an elastic element undergoes elastic deformation under a certain elastic stress, but exceeding its elastic limit will result in plastic deformation. The original elastic deformation characteristics of the sensor cannot be restored, so it is necessary to limit the elastic deformation variable, thereby limiting its working range. Any sensor has its measurement range, and generally speaking, the larger the sensitivity coefficient, the narrower the measurement range. The measurement range, also known as the range, is used to characterize the sensor's ability to withstand the maximum input quantity The ability of the sensor, whose value is the difference between the upper and lower limits of the sensor's display range. Due to the fact that the output and input of sensors are often two different quantities, sensitivity may be a dimensional parameter (mV/mm, mA/K, etc.).
The ability of the sensor, whose value is the difference between the upper and lower limits of the sensor's display range. Due to the fact that the output and input of sensors are often two different quantities, sensitivity may be a dimensional parameter (mV/mm, mA/K, etc.).
2. Sensitivity limit
Enter x to change& Delta; x. Output y changes& Delta; y. & Delta; X becomes smaller,& Delta; Y also becomes smaller, but generally speaking& Delta; When x is small to a certain extent, the output will no longer change, at which point& Delta; X is called the sensitivity limit, sometimes also known as resolution.
There are two main reasons for the existence of sensitivity limits. On the one hand, when the input changes very little, this change is absorbed internally by the sensor and cannot be reflected at the output end. This is like how many gaps always exist when the rack and gear are matched, if& Delta; X is equivalent to this gap, so this& Delta; X cannot be passed out. On the other hand, there is noise in the sensor output. If the sensor's output relative to the input is less than the noise level, it is difficult to distinguish useful signals from noise. The amplitude of noise varies according to statistical laws, and the root mean square value is commonly used to evaluate the noise level. Without adding the minimum input value (making the corresponding output value equivalent to the noise level), useful output values cannot be obtained, which provides the lowest sensitivity limit.
3. Linearity
Most German HBM sensors are designed according to a certain proportional relationship between input and output, but in reality, they cannot be achieved. For a nonlinear static characteristic, linearity is used to indicate the degree to which the static characteristic curve deviates from a fitting straight line. Usually from its maximum deviation& Delta; Y m and full scale (measurement range Ratio& Epsilon; L represents [Figure 2-2 (a)], with
Ratio& Epsilon; L represents [Figure 2-2 (a)], with

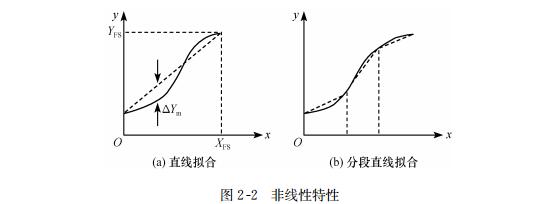
Due to the fact that nonlinearity is determined by a certain fitting straight line as the baseline, the linearity obtained by different fitting methods varies. The commonly used fitting methods include benchmark linear fitting, independent linear fitting, least squares fitting, etc. Obviously, this fitting will result in linearization errors. The segmented polyline approximation curve shown in Figure 2-2 (b) will have higher fitting accuracy, with more segments leading to higher fitting accuracy. For example, if the sensor is connected to a microcomputer system, linear compensation will be very easy and can effectively improve the measurement accuracy of the sensor.
4. Hysteresis difference
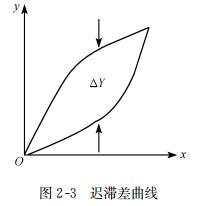
The gradual increase of the input of the German HBM sensor to a certain value is inconsistent with the output value when the input gradually decreases from high to low to the same value just now, which is called hysteresis phenomenon in most cases. The hysteresis phenomenon is caused by the influence of the input process on the response of the sensing element. In other words, this indicates that the sensing element has a memory function. Figure 2-3 shows a typical hysteresis characteristic curve, which corresponds to different outputs corresponding to an increasing input branch and a decreasing output branch, with a difference of& Delta; Y and full scale values The ratio is hysteresis difference.
The ratio is hysteresis difference.
5. Stability
When adding an input of the same size to the input of a German HBM sensor, the ideal scenario is that the output value remains unchanged at all times. But in fact, over time, most sensor characteristics will change. For inputs of the same size, even if the environmental conditions are completely the same, the output values obtained are different from before. This is because the characteristics of the sensing elements or components that make up the sensor change over time, resulting in a phenomenon called temporal variation. Even if placed for a long time, different sensors will also produce different temporal variations. Sensors with changes in characteristics related to usage times are more affected by the phenomenon of temporal changes.
When using German HBM sensors, if improper external forces or unnecessary heating are applied to the components, irreversible changes will occur, and the accumulation of such changes will inevitably cause changes in the sensor characteristics.
During continuous use of German HBM sensors, even if the input remains constant, there may be a phenomenon of output shifting in one direction, which is called drift. If the input value is 0, there will also be drift, which is called zero drift phenomenon.
Sometimes, when the power is turned on, the sensor's operation may become unstable, resulting in significant drift. At this time, the internal heat generation of the sensor has not yet reached the normal value, resulting in a decrease in the working point. However, such drift is temporary and will eventually disappear on its own. The time required to reach the normal state is called heating up time. Therefore, after turning on the power, it is best to avoid using sensors during the heating time.
The randomness of instability is relatively high, making it difficult to process with computers. Although there are many algorithms developed to correct zero drift and time drift, it is clearly much more difficult than correcting nonlinearity. Therefore, stability is a very important characteristic for sensors. Sensors that cannot achieve a certain level of stability cannot be used. If the stability of the newly developed sensor is poor, it is not enough to be called a sensor. It can only be said that a new physical or chemical conversion method has been studied.
★German HBM: Load cells - Series Z6F, C16I, C16A, RTN, HLCB1, PW2D, PW6D, PW2C, PW6K, PW6C, PW10A, PW12C, PW16A, PW22, S40A, C2, etc
★ German HBM: Torque/force sensors - T40B, T22, T5, U9C, C9C, S9M, U2B, S2M, and other series
★ German HBMWeighing instruments/transmitters - WE2111, RM4220, BM40, AE101, AE301, EM201 and other series
★ American CeltronSensors - STC, HBB, LPS, LOC, PSD, LCD, MBB, SQB, and other series
★ Tedea huntleigh: --341061635510151040102212601201241240 and other series
★ American TranscellSensors - BSS, BSH, DBSL, SBST, CR, SBS, BAB, and other series
★ Mettler Toledo: Load cells - TSC, TSB, MTB, GD, SLB415, SLB215, MT1022, MT1260, MT1241, SB, SBS, SBH, and other series
★ METTLER TOLEDO: Digital Sensor& Flash; GDD, SLC7200760, PDX, SLC820 and other series
★ Mettler Toledo: Control instruments - IND331, IND245, IND320L, IND230, IND560, B520, IND110, WM0800, AJB and other series
Contact person: Huang Hao Tel: 18688492451 (WeChat with same phone number)




Sales contact information:
Miss Chen:
sales@zhongxintmt.com
Mr. Huang:
huanghao@zhongxintmt.com




 Sales Engineer - Miss Chen
Sales Engineer - Miss Chen